分享到微信
车路协同应用之「应急优先」
1、前言
现代社会,自然灾害、意外灾害、公共卫生事件、社会安全事件等突发事件频繁发生, 给人民群众生命和财产安全带来巨大损失,应急响应成为社会服务中最重要的内容。应急车辆如消防车、救护车、警车,是应急响应系统中最基本的组成部分,确保应急车辆及时到达现场,对高效完成应急任务意义重大。
然而,在紧急事件高发的城市环境下,应急车辆到达事件现场的时间因交叉口和信号灯的存在而大幅增加,这一矛盾对交通管理是一个巨大的挑战。为了降低应急车辆的响应时间,提高应急交通和应急救援的效率,确保应急车辆安全且快速地通过交叉口,产学界提出了应急车辆信号优先系统的概念。
从概念诞生到如今的40年时间,应急车辆信号优先的实践效果依旧不理想,分析有以下几个问题[1]:
1)即使应急车辆在路口享有优先权,但由于排队或者拥堵导致应急车辆根本无法进入路口,即使社会车辆想避让但无换道空间。
2)信号控制系统无法实时获取应急车辆动态信息,优先策略设置不够精细导致绿灯闲置。
3)一般系统设计在应急车辆通过路口后不会考虑冲突方向的实际交通需求,而是尽可能快地恢复原有方案,这会导致冲突方向一定时间内连续排队而无法疏通。
国内外应急车辆信号优先的大规模实践落地公开报道较少。在国内长沙、天津、襄阳、重庆等国家级车联网示范先导区,车联网场景示范应用里体现了对基于车路协同的紧急车辆优先的支持。
在日本UTMS项目中的紧急救援支持系统(FAST)是为确保警车、消防车等紧急车辆能够迅速、安全地赶往交通事故现场实现的支援系统。它利用光信标接收紧急车辆发出的信息,再通过交通调控中心来调控紧急车辆行驶路线上的信号灯,延长绿灯的显示时间或缩短红灯的显示时间。
在美国Applied Information与高通合作在夏威夷部署了基于应急车辆优先系统EVPS(图1),系统给应急车辆提供优先通行,绿灯并清空了道路上的阻碍,使应急车辆更安全、高效地到达目的地。
该系统同时提供了一款TravelSafely手机APP供交通参与者使用,当附近有应急车辆接近时会通过APP提醒其它车辆驾驶员进行避让。
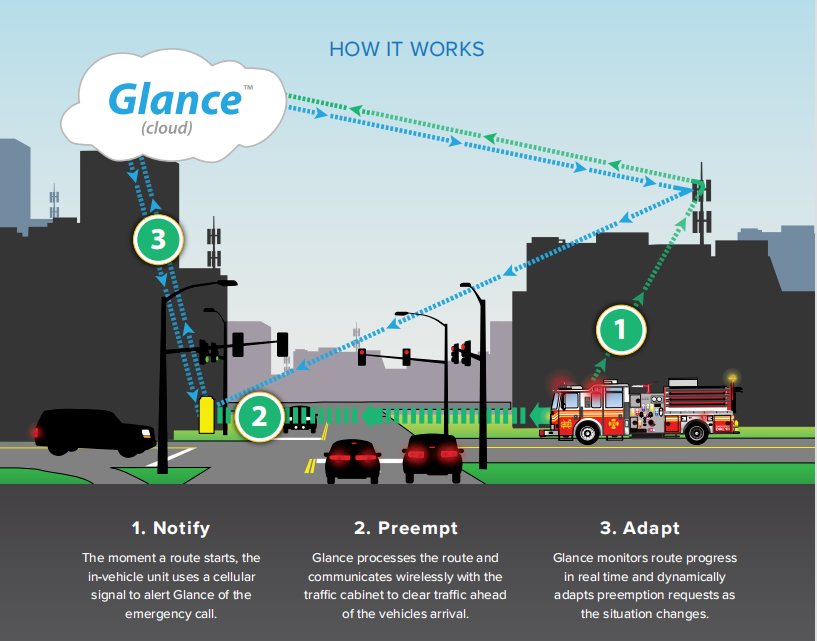
图1 AI EVPS系统示意图(该图片来自AI公司官网)
2、应急车辆信号优先和公交信号优先的区别
不同于公交信号优先,应急车辆信号优先是一种强制信号优先。美国国家运输ITS通信协议NTCIP 1202中对上述二者进行了明确区分:公交信号优先是指在信号控制交叉口给予公交车辆相对于其他车辆的优先权,这种优先不应导致相应的信号机脱离正常运行状态。
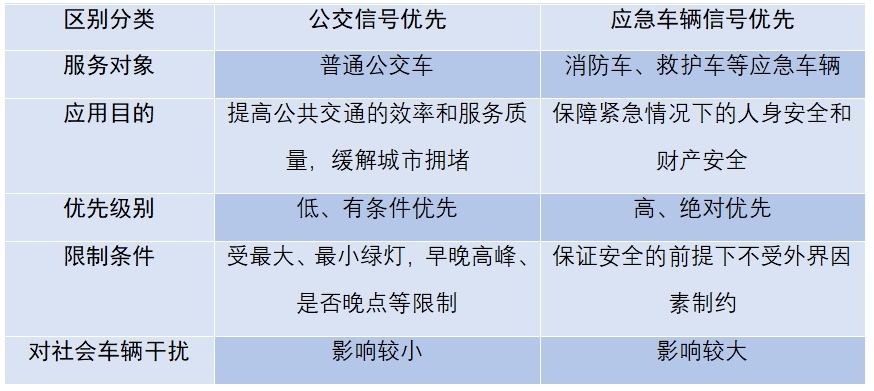
强制信号优先是指交通信号从正常状态切换到特殊状态,以满足紧急救援车辆、轨道交通等的通行,即需要中止正常的信号运行来提供特殊信号服务。两者的区别可从服务对象、应用目的、优先级别、限制条件、对社会车辆干扰五个方面对比,具体如表1所示:
表1 公交信号优先与应急车辆信号优先的区别
3、应急车辆信号优先系统运行模式
当交通控制信号系统在路口上游一定位置检测到应急车辆到达时,中断正在运行的信号方案,通过延长应急车辆通行方向的绿灯时间、或减少应急车辆通行方向的红灯时间、或给应急车辆通行方向插入一定时长的绿灯相位等策略,以提供一个绿色通道以保证其能够安全高效的通过路口。
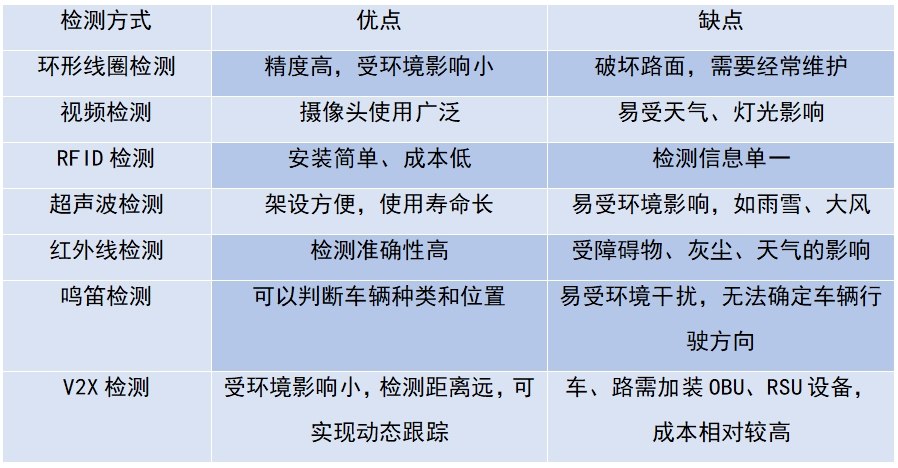
并且当检测到应急车辆通过路口后信号控制系统即恢复正常的运行方案,这便是应急车辆信号优先系统的基本运行模式[2]。所以,应急车辆到达检测是系统实现的关键,常用的检测方式如表2所示[3]。不同的技术手段都有其优缺点,在实际应用中可根据不同的道路和交通情况选择不同的实现方式。
表2 应急车辆检测方式及其优缺点
4、基于车路协同V2X的应急优先
相比与传统的RFID、摄像头等检测方式,采用V2X技术可以做到更精细化的应急车辆信号优先控制,可以很好的解决文章开头提到的三个问题,具体表现在:
1)通过装载在应急车辆上的OBU和路口RSU,系统可以准确且实时的获取应急车辆到路口的距离、时间、行驶方向。
2)基于OBU和RSU的长距离通信手段,系统可以更早地进行方案的研判,OBU实时数据系统可动态判断提前多久启亮绿灯、启亮哪个方向绿灯来清空前方排队的社会车辆,避免因排队导致应急车辆无法到达路口。
3)系统可通过路侧RSU同步将红绿灯数据广播给应急车辆,并给予合适的速度建议避免不必要的急加速、急刹车等行为,降低能源消耗和排放量。
4)系统可以从应急车辆OBU广播的数据及时判断车辆是否通过路口,一旦确认车辆通过可及时恢复常态运行方案来避免绿灯闲置,减少资源浪费。
基于车路系统V2X的应急车辆优先系统架构如图2所示,系统主要由车载单元(OBU)、路侧单元(RSU)、信号控制机(TSC)、信号灯(TSL)、云平台(CC)和人机界面(HMI)几部分组成。其中OBU、HMI部署在车端,RSU、TSC、TSL部署在路侧。
当装有OBU的应急车辆接近目标路口时会根据自车的运动状态数据(包括位置、航向、速度等)和来自RSU的MAP数据来判断是否发送应急优先请求。
RSU收到应急车辆的优先请求后根据请求方向和TSC实时推送的灯态数据确定优先策略并向TSC发送控制请求,TSC根据当前运行模式判断是否可控。
若可控,TSC执行优先方案,同时向RSU发送控制响应反馈,最后优先结果经OBU显示到HMI界面告知驾驶员。应急车辆优先系统的核心内容是优先控制算法,该算法在RSU中运行。RSU接收并解析来自TSC的灯态信息、来自应急车辆的优先请求数据和来自云平台CC的MAP数据。
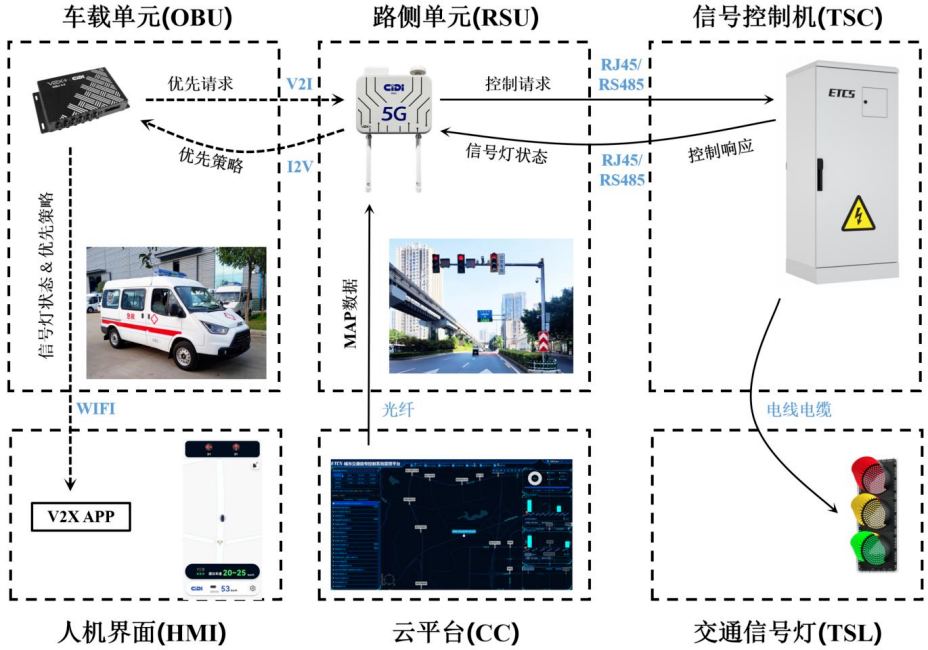
图2 基于V2X的应急车辆信号优先系统
5、应急优先的技术挑战
采用应急车辆信号优先系统的优势在于能够显著的减少应急车辆通过交叉口的行程时间和延误,这是设计该系统的初衷和目的。
但正是应急车辆优先的绝对性也对路口非优先方向交通产生了一定的负面影响,甚至会打乱交通信号控制系统原有的协调性[4]。特别是当路口流量较大时,非优先方向车辆通行需求剧增,当应急车辆通过路口后若不及时调整控制方案疏散非优先方向的排队车辆,会导致该方向车流的二次排队甚至引发交通拥堵。
当应急车辆通过路口后给予非优先方向一些绿灯补偿来减少其损失是一种普遍认可的方式。绿灯补偿思路主要分两种,一种是基于优先策略的固定补偿方式[4-7],另一种是基于交通状态的动态补偿方式[8-9]。不同的补偿方式不完全独立,可嵌套使用。
具体采用哪种方式,可以综合数据检测手段、路口控制模式、优先收益目标等考虑。
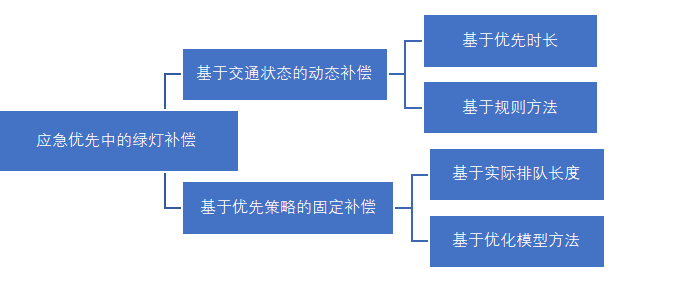
图3 应急车辆信号优先中的绿灯补偿
纵观国内外对应急优先成果,优化大规模应用实践效果还需进一步做以下几方面深入研究[1-9]:
1)动态路口管理与车辆行为预测。研究如何基于实时数据和预测模型,对路口进行动态管理,以适应交通状况和应急车辆的需求。同时,研究如何准确预测非优先车辆的行为和需求,以便更好地进行绿灯补偿和交通调度。
2)多模态交通优化。考虑不同交通模式(如公交、小车、自行车、步行等)之间的交互影响,研究如何在应急车辆信号优先系统中综合考虑不同交通模式的需求,以实现更全面的交通优化和绿灯补偿。
3)多应急车辆优先请求的处理。考虑不同应急车辆类型,不同的行驶方向,甚至车队形式通过路口情况下,优先策略优化。
4)协同优化与协同通信。研究如何通过车辆之间的协同优化和通信,实现应急车辆优先系统与非优先车辆之间有效的交互。涉及车车通信协议、数据共享和协同决策等方面的研究,实现高效、智能的交通调度。
5)可扩展性和适应性研究。进一步分析算法在各种流量需求水平、不同的网络几何形状和其他因素中的信号控制优化性能。
6)线路级或路网级影响评估。由于应急车辆信号优先,在对应急车辆运行线路甚至整个路网交通的影响分析和处理研究。
6、结束语
应急车辆信号优先系统设计,在保证应急车辆优先通过的前提下,非优先方向车辆通行权也值得考虑。确保应急车辆的安全、快速行驶,单点的应急车辆信号优先是关键,多点协调和最优路径规划也需助力。无论是交通管理者,还是系统设计者,做好应急车辆优先体现对生命的尊重。
相关新闻



欢迎关注西部交博




















