分享到微信
胡昂院士:数字孪生优化城市出行(下)
引言
9月8日,2023腾讯全球数字生态大会智慧交通专场在深圳国际会展中心举行。胡昂院士专程到场,作题为《数字孪生优化城市出行》特邀演讲。分享智慧交通的全球趋势与发展方向,以及基于数字孪生的智慧交通应用场景。以下是演讲全文。
04智慧交通的全球趋势和发展方向
今天,全球许多国家在智慧交通领域的实践与探索,为其发展描绘出清晰的路径。
加拿大多伦多滨水智慧社区(Sidewalk Toronto)使用数字技术推动人居环境空间与交通的混合利用:使用自动化技术促进交通运输体系智能化运作,适应自动驾驶的街道体系,让自动驾驶车辆与行人互不影响。社区运输体系也实现了自动化改造。
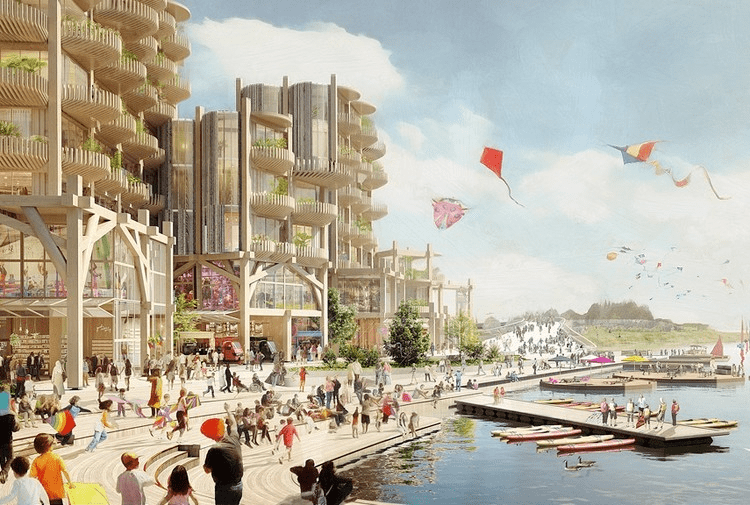
(来源:SIDEWALK LABS)
新加坡引入了智能交通系统,该系统利用实时数据和智能算法来管理城市交通流量。动态交通管理:新加坡的智能交通系统可以根据实时交通流量和拥堵情况调整交通信号灯配时管理。这有助于减少交通堵塞,提高交通效率。在低碳社区中建设了电动汽车充电基础设施,鼓励居民使用电动汽车。智能应用可以帮助居民找到附近的充电站,提供方便的充电解决方案。智能公共交通系统则包括实时公交信息和预订系统。居民可以使用应用程序查看公交车实时位置、到达时间和座位可用情况,提高了公共交通的便利性。

(来源:MyTransport.SG )
阿姆斯特丹采用了多种智能交通解决方案,以实现低碳社区的建设:自行车共享系统:阿姆斯特丹鼓励居民使用自行车,减少机动车辆的使用。智能自行车共享系统使居民可以轻松租赁自行车,并通过应用程序找到附近的自行车停放点。智能停车系统:为了减少城市中的寻找停车位时间,阿姆斯特丹实施了智能停车系统。居民可以使用应用程序查找附近的停车位,并预订车位,提高了停车的效率。电动巴士:阿姆斯特丹推出了电动巴士服务,以减少城市中的尾气排放。这些电动巴士采用智能技术来调整路线,以适应实时交通状况。

(来源:SMART PARKING)
日本智能交通发展的四个战略方向:作为信息通信技术领域的先驱,日本通信基础设施和尖端通信技术公司正在积极致力于推动智能交通的发展。日本国土交通省对智能交通发展提出了四个战略方向:
一是推动当地社区的公共交通便利化,在不同交通方式之间实现有机整合,以提高流动效率,减少拥堵,并优化出行体验。通过创新的移动服务模式,将交通工具转变为提供多种服务的平台,满足用户多样化的需求。与多个行业合作,我们利用流动服务带来的收入,促进创新,提高资源利用效率,并增强城市可持续发展。
二是利用信息技术改变当地交通,为了引导人们改变出行习惯以减少拥堵和环境影响,创造了一种新的机制,使人们逐渐调整他们的出行方式。获取与流动相关的数据,与交通和城市政策合作;
三是实现人员、货物和服务的自动运输,互联技术可以协助改善这环境合规性问题,包括劳动力短缺问题以及促进数字化进程;
四是促进自动驾驶技术的广泛应用,不仅仅关乎车辆的自主导航,更将引领智能交通系统的崭新时代,涵盖从智能交通管理到基础设施建设、智能城市规划的各个层面。
在智能交通的发展进程中,数字孪生技术的应用正备受瞩目。数字孪生技术可以模拟道路、交通流、车辆行为等,以帮助改进交通管理、优化道路使用、提高交通安全等。例如,它可以用于测试新的交通管理策略、预测拥堵、优化信号灯配时,以及支持自动驾驶车辆的研发和测试。
05数字孪生优化城市出行案例
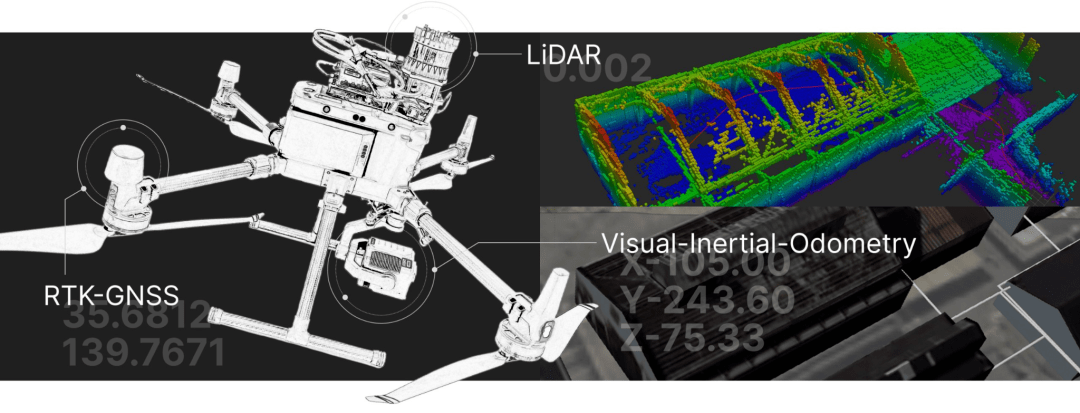
案例四 无人机自主巡航
(物流服务)

(来源:PLATEAU)
在城市地区的建筑工程中,建筑材料运输所导致的交通拥堵问题以及提高室外和室内不同规格和重量材料的“最后一英里”运输效率难以提升是业界公认的难题。这些挑战不仅会导致建筑工程的延误,还会对附近居民的生活和城市功能产生影响,例如需要对目标区域进行道路封闭。
为了解决这些问题,目前正在研究使用自主无人机进行材料运输。然而,在城市地区实现准确且安全的飞行仍面临许多挑战,如GPS定位的不稳定性以及SLAM技术的高成本和缺乏准确性。
(来源:PLATEAU)
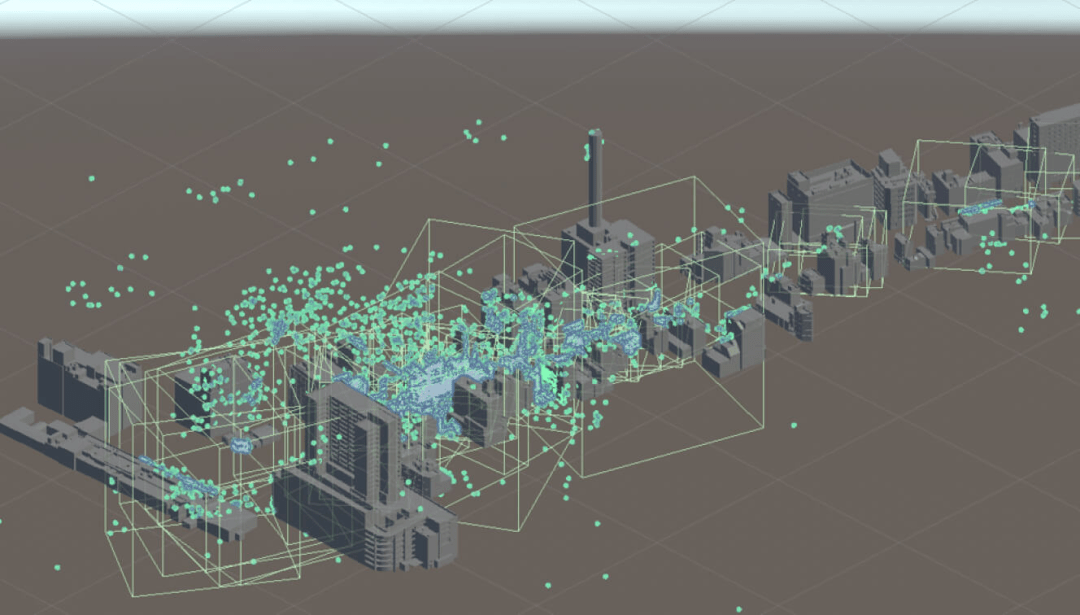
在2022财政年度的“利用三维城市模型和BIM的机动性自主操作系统”项目中,将通过将三维城市模型BIM地图集成到点云数据中,并利用该集成地图来支持基于激光雷达SLAM和GPS定位的自定位,以开发高精度、低成本且可扩展的室内外无人机系统。在此项目中,高精度、低成本且可扩展的室内外无人机自主操作系统已经成功开发。
通过对该系统的演示验证,已证实了利用集成地图实现无人机在室外和室内之间自主操作的可行性,并取得了一定的成果。基于该系统,将进行自主无人机系统的可行性研究,以在具有不同特征的空间(如城市地区的室内和室外空间以及建筑物沿线的垂直空间)中实现无缝移动。该项目的目标是实现高精度且稳定的无人机自主操作系统,并将无人机作为新型社会移动服务进行实施。
(来源:PLATEAU)
案例五 车辆自主巡航
(自动驾驶)
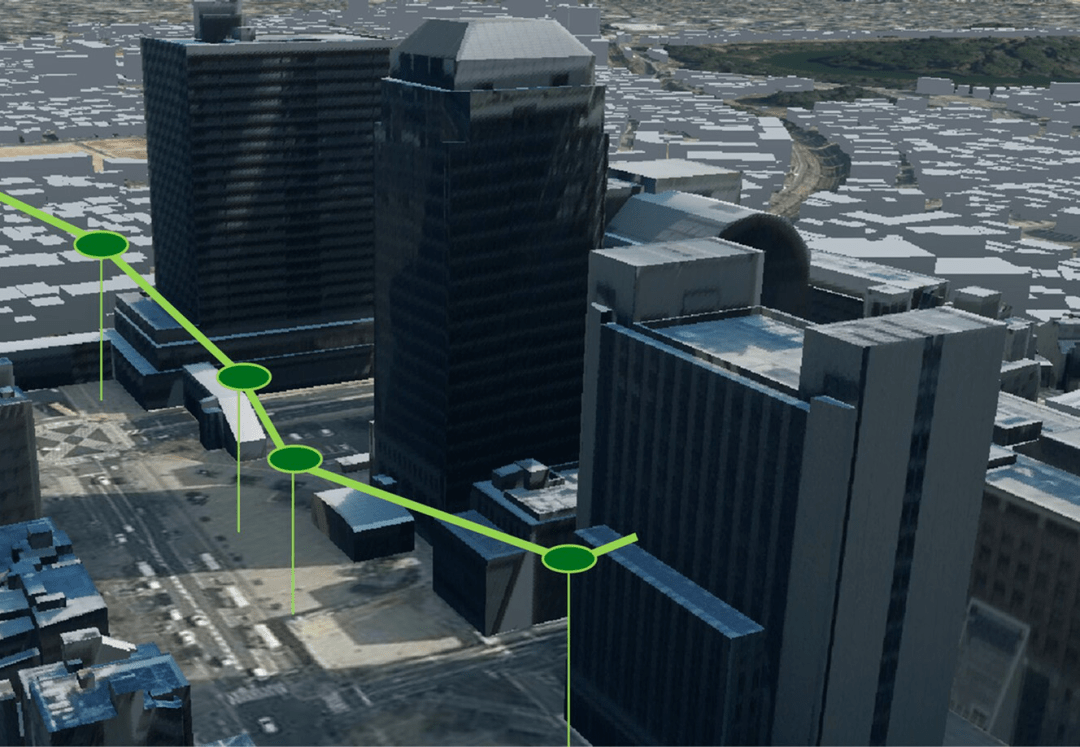
(来源:PLATEAU)
目前的自动驾驶系统主要使用基于GPS的定位技术,但在复杂环境中精度有限,而且在公共道路上的自动驾驶安全性仍存在问题。另一方面,使用激光雷达和SLAM技术可以提供更高的精度,但需要提前获取精确的地图,并且缺乏灵活性。
因此,在2022年,该实验项目开发了一种"使用三维城市模型和BIM的移动性自主操作系统" 的系统,该系统通过虚拟空间中的虚拟车辆和虚拟激光雷达来获取假定路线上的点云数据,并在真实空间中实现自主定位。
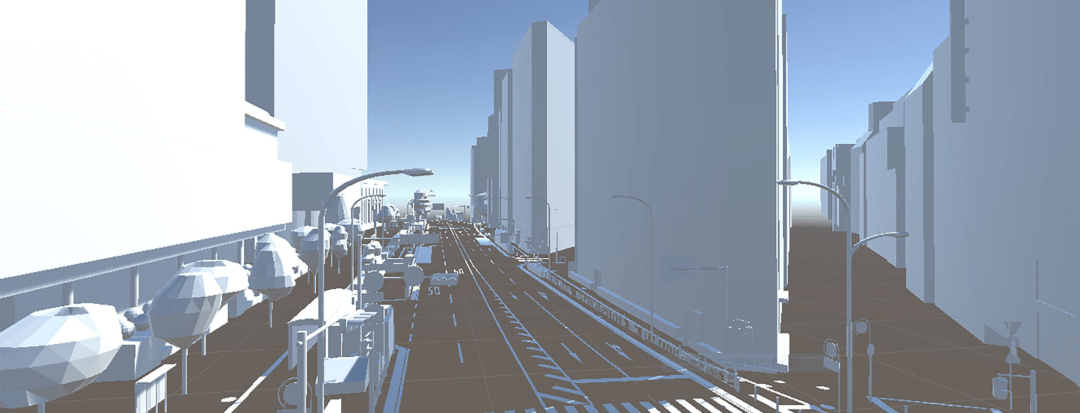
(来源:PLATEAU)
在演示中,该系统在一些情况下成功实现了自定位,但仍然面临挑战,特别是在真实世界和虚拟模型之间存在差异的情况下。为了克服这些问题,计划进行改进,以提高自定位的准确性,并进一步发展虚拟点云生成技术。为了提高精度,将改进虚拟激光雷达从三维城市模型生成点云图的算法,以适应不同城市特征和不同细节级别的模型。同时,为了通用化虚拟点云生成过程,将开发一个基于游戏引擎的系统,可以在虚拟空间中模拟运行虚拟激光雷达,从而生成假定路线上的点云数据。
通过这些改进,该项目建立一种基于仅由三维城市模型生成的点云图的高精度自动定位方法以解决传统自动驾驶系统存在的问题。最终目标是在社会中实现无人驾驶运输车辆的自动驾驶系统,为材料运输和物流领域带来更高效、更安全的解决方案。
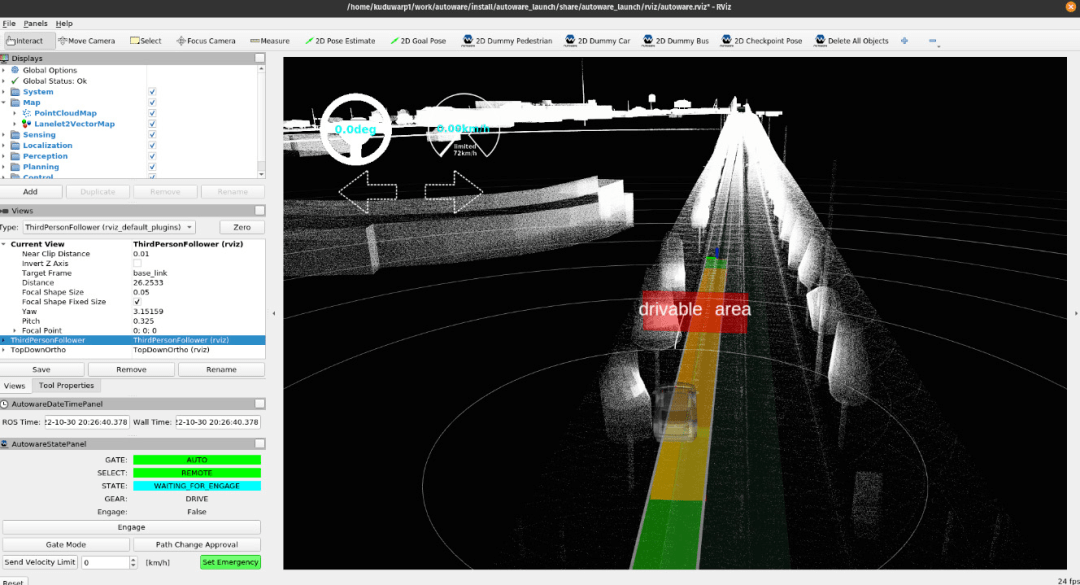
(来源:PLATEAU)
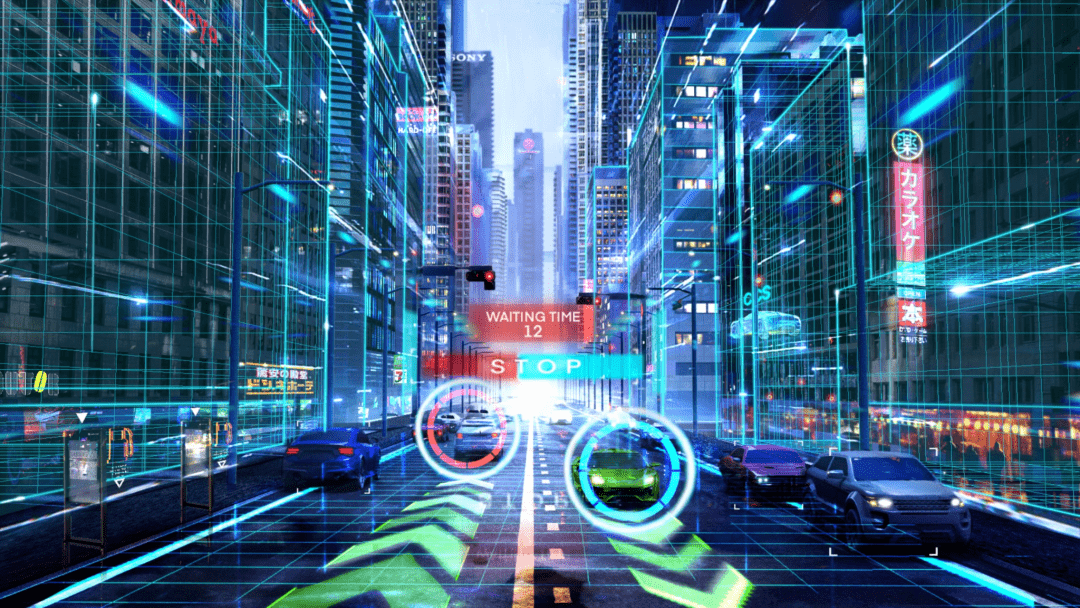
案例六 利用VPS进行自动驾驶车辆的自主定位
(自我定位系统开发)

(来源:PLATEAU)
日本的公共和私营部门正在为实现自动驾驶进行大量的研发、演示和实施,PLATEAU 也致力于使用 3D 城市模型来演示和实施自动驾驶技术。
目前自动驾驶系统中,自身位置判断常使用各种传感器,以及3D矢量数据、3D点云数据等各种数据,技术上已经达到了一定的实用水平。但为了普及廉价、简单、安全和可扩展的自动驾驶系统,有必要建立结合3D城市模型和光学相机图像的VPS技术。
(来源:PLATEAU)
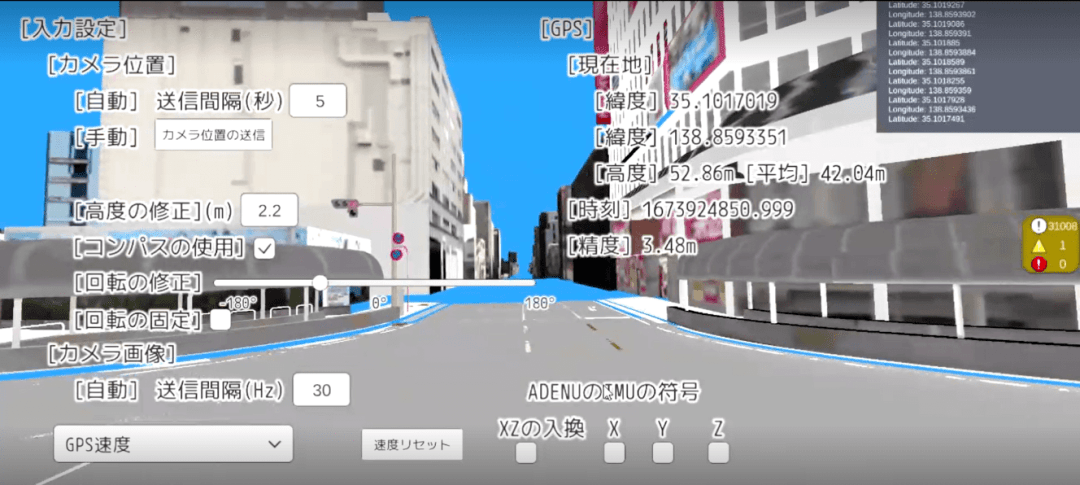
2021年该实验验证了一种利用VPS(视觉定位系统)来估计自动驾驶汽车自身位置的新方法,该方法结合了3D城市模型和摄像头图像。通过分析光学相机图像中获取的三维信息,并将其与预先准备的三维地图进行比较,从而估计车辆的自身位置。该实验将从智能手机摄像头捕捉的图像信息与LOD3级别的3D城市模型特征进行比较,其中包括建筑物的详细形状、道路、城市设施等。通过这种方式,该实验验证了用于车辆自身位置估计的系统,并进行了可行性研究,以将其应用于自动驾驶系统。

(来源:PLATEAU)
2022年演示实验是使用一种不仅依赖纹理信息,利用建筑物等特征和形状生成的特征的方法来创建3D城市。针对模型优化的 VPS。利用研究所提供的C-STAR算法,以将自我位置估计系统投入实际使用为目的进行开发。实验通过将相机图像与3D城市模型渲染的图像进行比较来估计车辆的自身位置,并进行可行性研究,以期未来能为自动驾驶车辆构建高精度的自我定位估计系统。
通过驾驶演示,能够确认该系统能够执行自我位置估计。从精度来看,自定位坐标集中在0~8m范围内,峰值距真实值2~4m。
(来源:PLATEAU)
06总结
数字孪生技术在现代城市出行领域崭露头角,为我们带来了前所未有的机遇和挑战。通过在虚拟世界中构建城市的精确模型,数字孪生为我们提供了优化城市出行的强大工具。从交通流模拟到智能导航,从交通管理到城市规划,数字孪生技术使我们能够更深入地理解交通系统的运行机理,并基于这些认知进行智能决策。
尽管,数字孪生也面临着一系列的挑战和课题。基础建设、数据隐私、信息安全以及数据收集和处理的复杂性,都需要我们在技术发展的同时积极探索解决方案。同时,数字孪生的应用需要跨部门合作和政策支持,才能真正实现对城市出行的深度优化。
总的来说,数字孪生技术为优化城市出行带来了新的可能性,为实现更智能、高效、可持续的城市交通系统提供了有力支持。随着技术的不断演进和合作的深入,我们有信心能够克服挑战,将数字孪生的潜力转化为现实,创造更宜居、便捷和绿色的城市出行环境。
相关新闻



欢迎关注西部交博




















