分享到微信
车圈热议的「端到端」自动驾驶讲了个什么故事
7月30日凌晨,特斯拉CEO埃隆·马斯克发帖称:“FSD 12.5.1今天开始广泛发布(wide release)。请将特斯拉连接至WiFi以接收更新。”针对网友的提问,马斯克回答到:“由此开始,它将极大提升。”
据悉本次特斯拉将高速公路技术栈升级到最新版本,使得系统拥有了统一集成的高速加城市技术栈,这已经是特斯拉FSD V12版本发布以来的第四次重大更新。
2024年1月,特斯拉开始在北美地区正式推送FSD V12,4月用户累计行驶里程已超过10亿英里,基于海量驾驶数据,特斯拉FSD迎来奇点时刻,在FSD V12.3的推送中率先实现了端到端的神经网络模型上车,该技术的优势在于其简洁性和高效性,不再进行识别和标记,摆脱人为规控规则编码,大幅提高自动驾驶感知决策能力,在自动驾驶的安全性能和用户体验方面取得了巨大提升,由此,自动驾驶行业对端到端模式的竞逐进一步加速......
什么是端到端自动驾驶?
端到端自动驾驶的起源最早可追溯到1988年,由卡耐基梅隆大学开发的ALVINN(Autonomous Land Vehicle in a Neural Network)被视为是最早尝试使用神经网络实现端到端自动驾驶的系统之一,ALVINN的目标是通过神经网络实现端到端的自动驾驶,即从传感器输入到车辆控制输出的全过程,它使用摄像头输入,直接输出转向指令。
传统自动驾驶系统通常采用模块化串联的部署方式,感知、定位、预测、决策、控制等主要模块及其子模块都承担着特定的职责,且每个模块的输入通常来源于前一模块的输出。这样的优势在于能够将复杂的自动驾驶任务分解为更小、更易于管理的子任务,同时便于问题的追踪和定位,但信息传递过程中可能出现的损耗、计算延迟以及累积误差等问题。
而端到端的一端,是摄像头、激光雷达等传感器和其他信息输入设备,负责输入环境、自车的状态(位置、车辆位姿)和导航等信息。另一端,是通过端到端计算最终输出的行驶轨迹,跳过了传统自动驾驶系统中的特征提取和规则制定过程。它将完全基于数据驱动进行全局任务优化,拥有更简洁的系统架构,更高的计算效率以及更强的泛化能力。
早期,端到端的核心定义是“从传感器输入到控制输出的单一神经网络模型”,近年来,端到端的概念有了更大范围的延展。此前,辰韬资本等多家机构联合发布的《端到端自动驾驶行业研究报告》中,将端到端的核心定义标准应为:感知信息无损传递、可以实现自动驾驶系统的全局优化。基于以上定义标准,自动驾驶技术架构分为四个阶段,分别是感知“端到端”、决策规划模型化、模块化端到端(也有称分段式端到端)、以及一体化端到端(One Model),其中,后两个阶段符合前述端到端的定义标准。
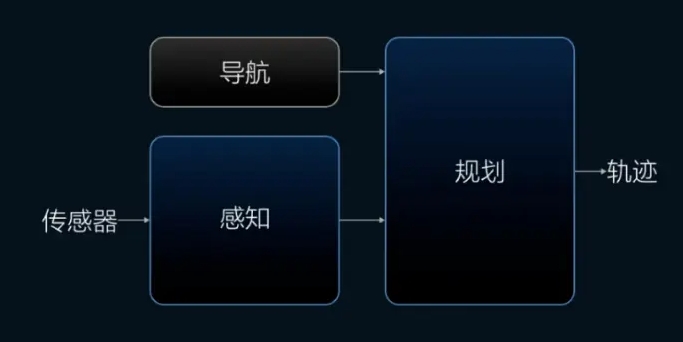
分段式端到端示意图 图源:理想汽车
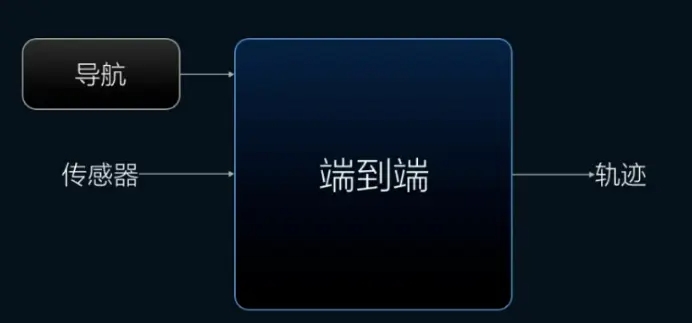
一体化端到端(One Model)示意图 图源:理想汽车
端到端技术迎来爆发之年
整体来看,这不单单是单一技术的爆发,进入2024年之后,市场和舆论,对于自动驾驶产业整体的关注度都再上新台阶。市场方面,伴随着密集宣传与曝光,公众对于自动驾驶的接受度与认可度在显著提升,智驾功能开始在新能源汽车销售当中占据越来越大的影响权重,这也影响了投资者对于自动驾驶发展的判断,市场热度不断攀升。技术层面,底层AI技术的进步和算力硬件的提升为端到端自动驾驶的发展带来了更多可能。
2023年以来,模块化端到端和一体化端到端都有了重大的进步。UniAD提出了革命性的模块化端到端方案,成为这一技术路线的基准范式,Wavye的生成式世界模型GAIA-1,以及视觉-语言-动作模型LINGO-2可能是未来OneModel端到端的重要基础;FSD V12作为一个可以感受的产品,让端到端技术路线出现在更多人的视野中。
在国内,主机厂商相继跟进,4月24日华为智能汽车解决方案发布会上,华为发布了以智能驾驶为核心的全新智能汽车解决方案品牌--乾崑和ADS 3.0架构,实现了决策规划的模型化,为端到端架构的持续演进奠定了基础。5月20日,小鹏汽车举办AI Day发布会,董事长、CEO何小鹏宣布端到端大模型上车。蔚来汽车、零一汽车等主机厂也纷纷公布端到端技术研发进度。
自动驾驶和算法公司也接连发布相关解决方案,2024年4月举办的北京车展上,商汤绝影推出面向量产的端到端自动驾驶解决方案“UniAD”。元戎启行推出了其即将量产的高端智能驾驶平台DeepRoute 10,该平台同样采用了端到端自动驾驶模型。
据《端到端自动驾驶行业研究报告》访谈调研显示,90%受访者表示自已所供职的公司已投入研发端到端技术,一时之间,端到端自动驾驶似乎已经成为明确的行业共识。
端到端是否会是单车智能的最终形态?
关于这个问题,当前行业观点仍存在较多分歧,端到端自动驾驶也尚未出现可参考的最佳实践案例。
商汤绝影智能驾驶方案总监赵祥磊此前接受媒体采访时表示,目前国内基于模型感知和模型规控的两段式方案,容易造成信息传递的丢失和误差,存在性能上限瓶颈,需要向具备统一感知决策规划能力的端到端方案演进。
而特斯拉为代表的纯视觉+一体化端到端的解决方案在稳定性方面也仍有待提高,据7月31日消息,美国华盛顿州当局周二表示,已确定今年4月在西雅图附近撞死一名摩托车手的特斯拉汽车,在事故发生时正运行FSD模式。
调查人员从这辆2022款特斯拉 Model S上的事件数据记录器下载信息后确认了这一事实。肇事司机已被逮捕,“原因是他在FSD模式下承认驾驶时注意力不集中,并且在向前行驶时分心使用手机,相信机器会为他驾驶”。特斯拉 CEO 马斯克在最近的财报电话会议上,承认自己过去的FSD的预测“过于乐观”。他表示,预计到今年年底,“FSD”系统将能够在无人监督的情况下运行。
技术层面,端到端的训练方式让模型存在不可解释性,安全性和鲁棒性方面可能存在挑战,尤其是在处理未曾见过的情况时。
产业层面,大模型需要大算力,需要厂商不断提升GPU的采购规模,且需要极大规模的高质量数据,采集、清洗、筛选都是难点,这意味着端到端模型的训练成本非常高。
辉羲智能联合创始人章健勇在此前接受媒体采访时表示“我们认为特斯拉FSD是一种门槛极高的可扩展能力,但特斯拉领先的原因在于已构建全闭环、自成长的AI数据体系。无论是从自研芯片、数据、训练还是算法来看,国内不能照搬特斯拉的模式来实现自动驾驶。”
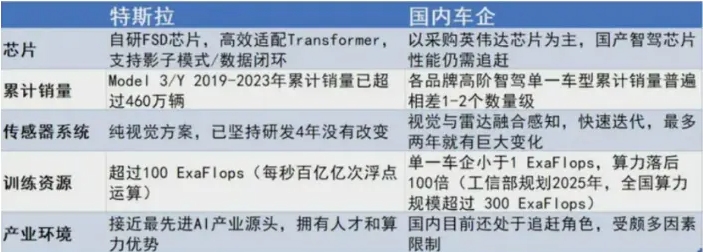
特斯拉与国内车企差距 信息来源:辉羲智能
因此,要断言端到端是自动驾驶的最终答案可能还为时过早。
对车路云一体化的影响
从路侧的角度看,端到端技术的发展将会如何影响未来“车路云一体化建设”?首先,笔者认为,单车智能技术的发展不会影响我们选择车路协同路线的整体基调。
一是因为车路云一体化更加安全可控,可以更方便的构建安全监管防御体系,在数据安全、数据确权、驾驶安全、国家安全等方面具备更高的安全可控性。
二是基于路侧设备布设特点,车路协同路线自动驾驶水平上限更高。如果说基于成熟的车端感知设备和海量的驾驶数据投喂可以使单车智能自动驾驶达到人类驾驶员的驾驶水准的上限,那么通过路侧设备的赋能,可以使自动驾驶车辆在处理道路交通情况时达到超越人类驾驶员的安全与效率水平。
有观点认为路侧感知设备位置高,视野好,遮挡少,同时不受车端的空间、功耗限制,因此可以选择布设检测能力更强更丰富的感知设备与边缘计算设备,理论上可以拥有高于车端的信息处理能力,提供更优的路径规划,在预防鬼探头、多车交汇等突发、复杂道路场景时也可以提供更好的支持。
再结合产业安全、服务边界等因素之后,车路协同路线仍具备一定的不可替代性。但随着单车自动驾驶越来越智能,路侧设施想要服务自动驾驶的也需要重新考虑一些问题,路侧数据该以何种形式参与到车端决策?参与到哪个环节当中?车端算法、算力持续提升,路侧、云端算力该如何部署更为合理......
目前看,不论是单车智能还是车路云一体化,想要获得较为理想的自动驾驶状态,还有很长的路要走。
相关新闻



欢迎关注西部交博




















